




Livox Mid-360S
Dai un’occhiata più da vicino

Prestazioni superiori con angolo cieco ridotto
Mid-360S può rilevare oggetti a una distanza minima di 10 cm [1]. Le sue dimensioni compatte ne facilitano il montaggio e offrono una copertura senza angoli ciechi.

Anti-interferenza attiva
Mid-360S presenta un design anti-interferenza attivo, garantendo prestazioni senza le interruzioni causate da molteplici segnali LiDAR, anche negli ambienti interni.
Più piccolo e più leggero
Mid-360S racchiude prestazioni potenti in un design compatto. Può quindi essere integrato in maniera elegante e discreta, dando vita a nuove concezioni di design per i robot mobili.

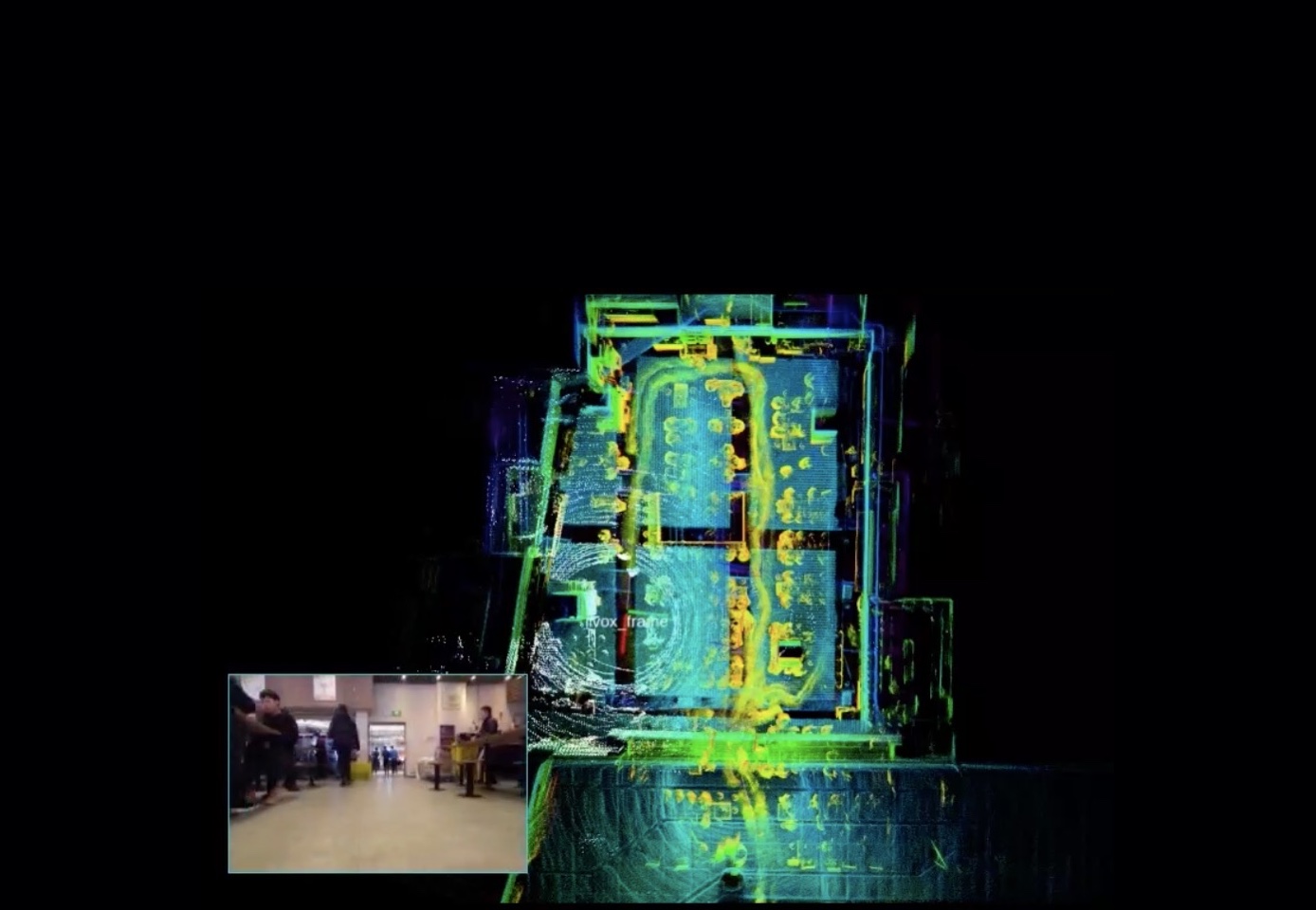
FOV super-ampio a 360° [2]
Grazie alla tecnologia ibrida‑solida di Livox, Mid-360S offre un incredibile FOV di 360° × 59° [2]. Questa ampia visuale fornisce dati delle nuvole di punti 3D completi per una pianificazione robotica e un processo decisionale avanzati.
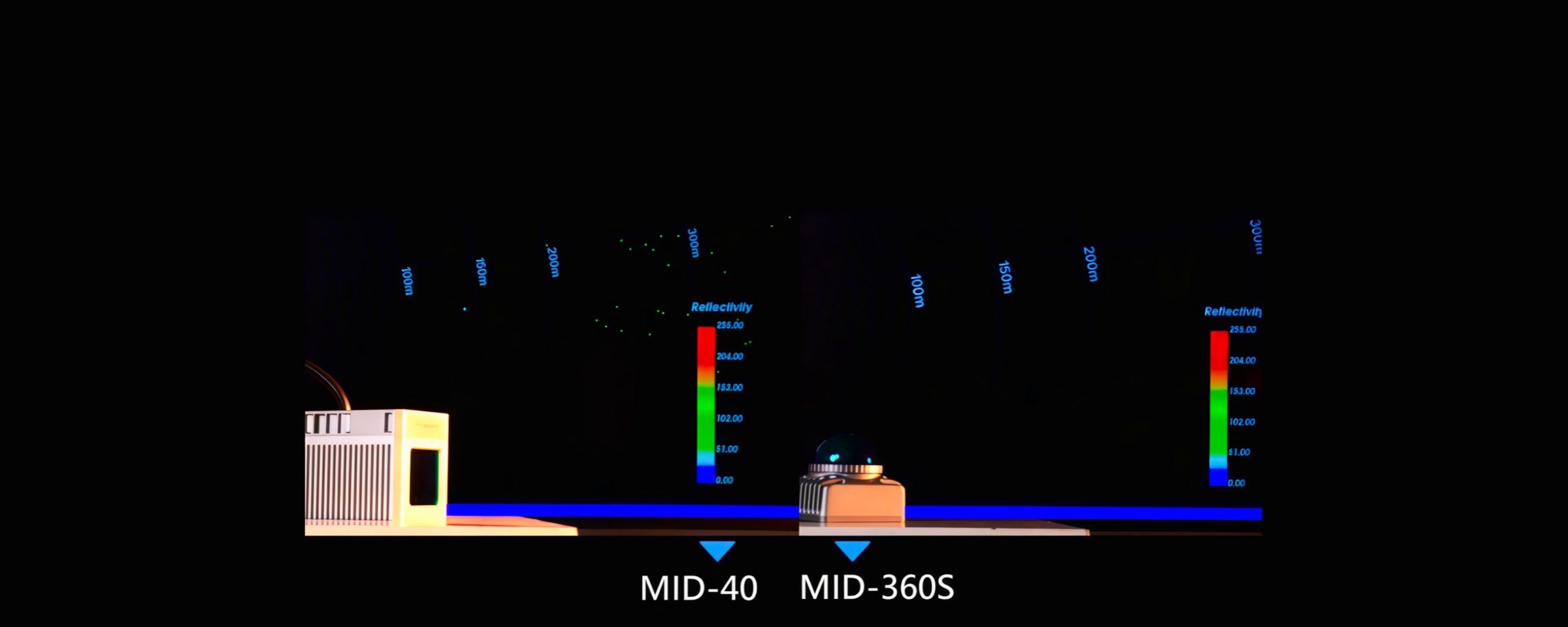
Resistente alla luce ambientale intensa
Mid-360S ha una portata di rilevamento massima fino a 100 m (distanza limite). Offre prestazioni costantemente eccellenti sia in ambienti interni con scarsa illuminazione che in ambienti esterni luminosi.





Contenuto della confezione

Livox Mid-360S
× 1
Panno per la pulizia delle lenti
× 1

Chiave a brugola a L
× 1
Confezione di viti
× 1




Rispondiamo alle tue domande.
Quali metodi di sincronizzazione dell’ora sono supportati da Mid-360S?
Mid-360S supporta due metodi di sincronizzazione dell’ora: IEEE 1588-2008 (PTP v2) e GPS.
Quale modalità di scansione utilizza Mid-360S?
Mid-360S supporta solo la modalità di scansione non ripetitiva.
Mid-360S è progettato con una IMU integrata? Qual è il modello?
Mid-360S è dotato di una IMU integrata modello ICM40609. L'intervallo di misurazione dell'accelerometro e del giroscopio è rispettivamente di ±4 g e ±2000 deg/s. Gli utenti possono abilitare o disabilitare l’output dei dati IMU tramite Livox Viewer 2 o l’SDK. Quando è abilitato, Mid-360S rilascia i dati IMU a una frequenza di 200 Hz.
Mid-360S può utilizzare l’SDK e i driver ROS dei precedenti prodotti Livox?
No. Rispetto ai precedenti prodotti Livox, Mid-360S utilizza un protocollo di comunicazione diverso, quindi per lo sviluppo sono necessari un nuovo SDK e nuovi driver ROS. Per maggiori dettagli, visitare:
Livox SDK 2: https://github.com/Livox-SDK/Livox-SDK2
Livox ROS Driver 2: https://github.com/Livox-SDK/livox_ros_driver2
Mid-360S supporta il funzionamento quando più sensori LiDAR trasmettono sulla stessa banda di frequenza nelle vicinanze?
La funzione anti-interferenza attiva di Mid-360S garantisce prestazioni affidabili senza le interruzioni causate da molteplici segnali LiDAR, anche quando trasmettono sulla stessa banda di frequenza nelle immediate vicinanze.
Mid-360S può utilizzare il Livox Converter 2.0 standard e gli altri cavi dei prodotti precedenti?
Per scopi di test o dimostrazione senza utilizzare la sincronizzazione GPS, è possibile usare gli accessori e i cavi di Livox Avia, Mid-70, Tele-15 e Horizon. Per un utilizzo commerciale su larga scala o per la produzione di massa, è necessario personalizzare i cavi di alimentazione e di comunicazione in base alle definizioni delle interfacce di Mid-360S.
Altre domande? Fatti aiutare da un esperto DJI.
1. Se l'oggetto target si trova tra 0,1 m e 0,2 m dal sensore, i dati delle nuvole di punti possono essere rilevati e generati, ma poiché non è possibile garantire l'accuratezza del rilevamento, questi dati sono solo a scopo di riferimento.
2. La portata effettiva di Mid-360S varia nelle diverse aree del FOV. Nell'intervallo del FOV verticale, più ci si avvicina alla parte superiore, più corto è la portata effettiva, mentre più ci si avvicina alla parte inferiore, più lungo è la portata effettiva. Per dettagli, consultare il manuale d'uso.
3. Mid-360S ha una portata di rilevamento massima di 100 m (distanza limite). A una temperatura ambiente di 25 °C, la tipica distanza massima di rilevamento è di 40 m quando la riflettività della superficie dell’oggetto target è del 10%.